Meet BalanceHAT: Our New Raspberry Pi HAT to Build Fun Robots with Copper!
We are excited to share with you, BalanceHAT, a small piece of hardware we built originally to test Copper but could be useful to teach robotics or Rust for some students or simply to have fun with Copper, feel free to reach out, we can build more of them!
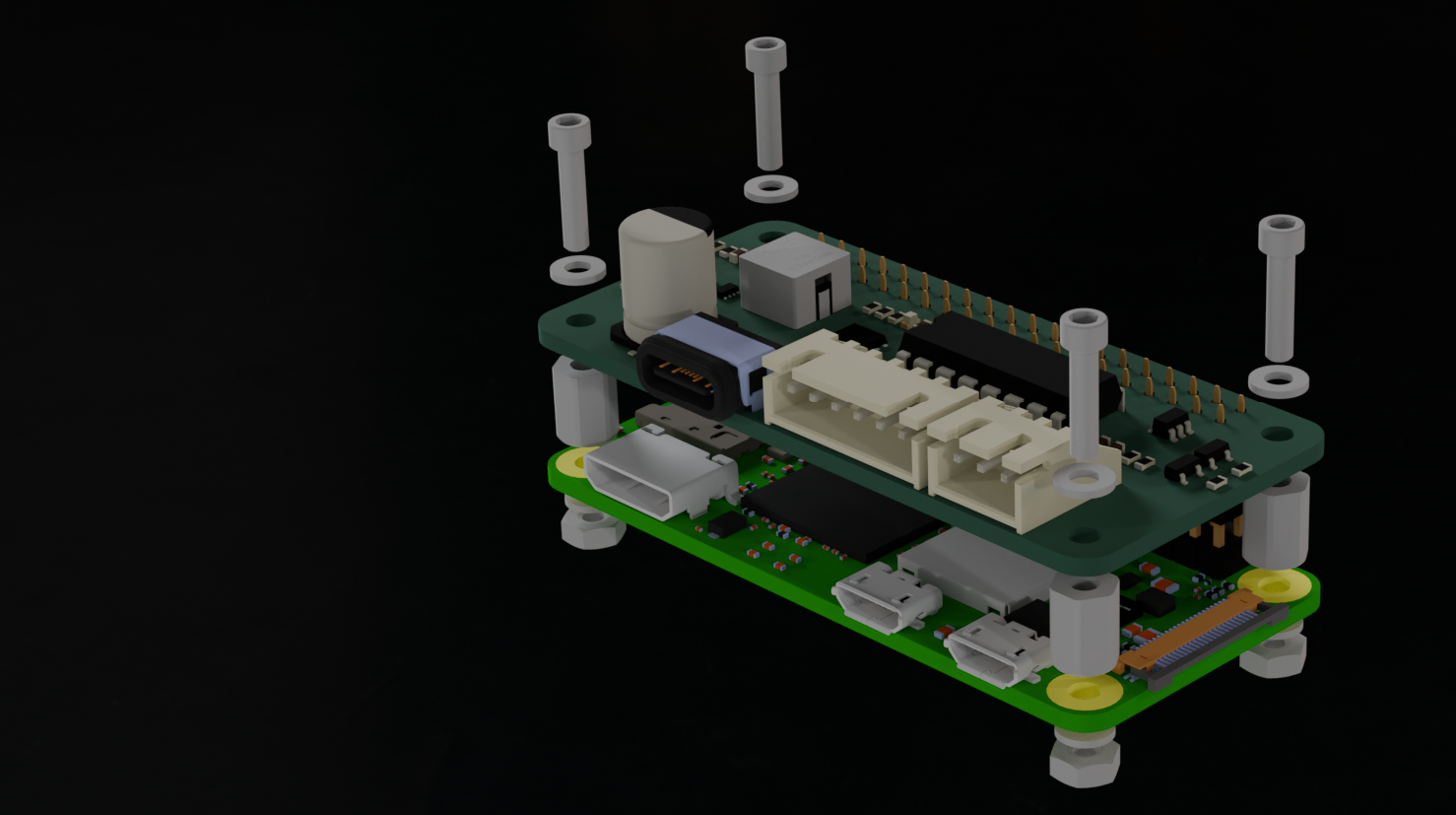
BalanceHAT, a tiny little robot controller that fits on top of a Raspberry Pi Zero W
Some background: while working on various pieces of hardware to test Copper on them, I picked on purpose a very under-powered platform like the Zero to push the limits of what the software engine can do.
Doing this I ended up with contraptions like this horrible rat nest…

This is where you see that Ben Eater is the living god of the breadboard!
And decided to clean that up and build a proper self contained RPi HAT for it.
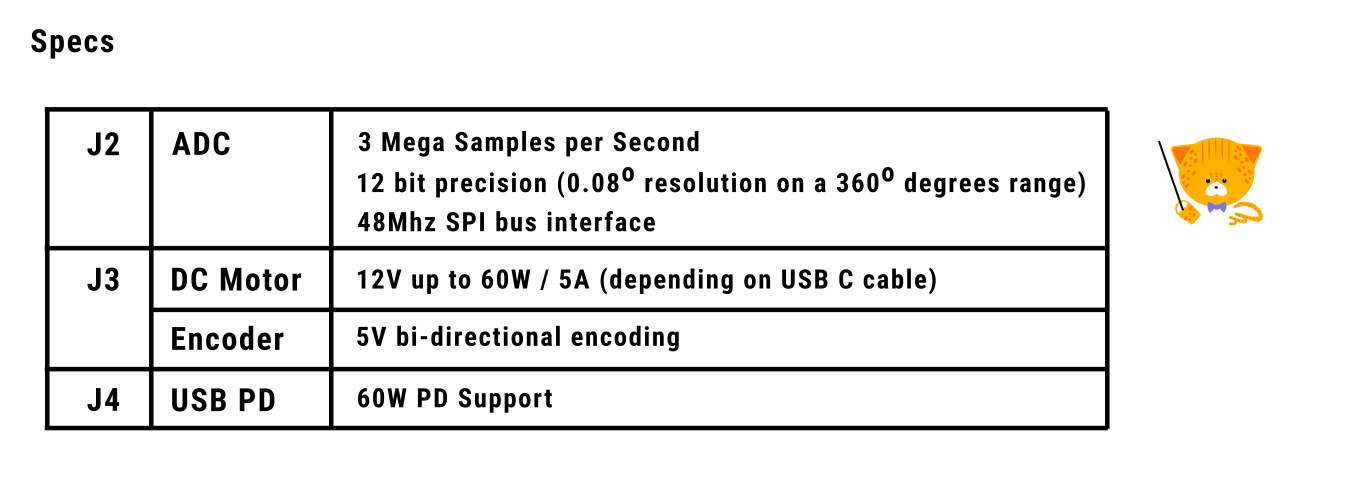
So what can this Robot controller do?
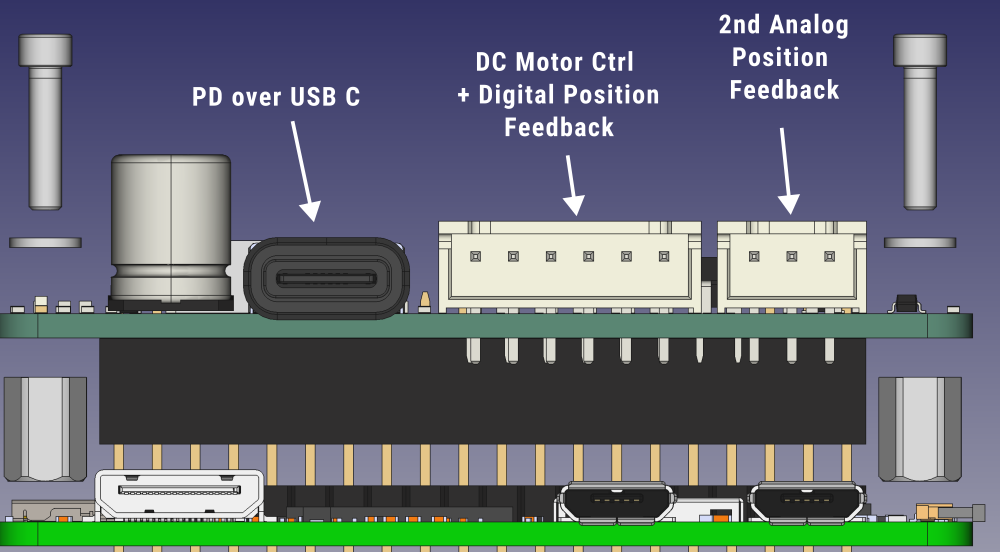
BalanceHAT connectivity
It can:
Actuate 1 DC Motor (through the Zero PWM outputs)
Get a directional Hall encoder input (ie. the feedback from the DC motor for how much it traveled and in which direction)
Get a positional Analog feedback for a secondary sensor
All that powering the entire system through one USB C power source (with PD).
This is all you need to build nifty little robots like:
a self balancing rod
a self balancing one wheeler (we understand why it is called balanceHAT by now).
various Roomba like vehicles


^^ some example of HW projects found on the web with the compatible actuators and motors.
And this is what we want to do with it and bring some of them at trade shows.
And of course first class Copper support in Rust (drivers, examples …) will be open sourced!